
Installation and connection
Safety rules
To perform the protection functions, the BMS must be able to disconnect the battery from the load and charger. To do this, at least one contactor able to break the load and charge circuits must be connected to the BMS.
Before use, configure the system. Proper operation of the BMS is possible only if it is correctly configured.
Installation procedure
The mounting location of the BMS Main 2R device must be protected from mechanical particles (dust, dirt, large objects) and water. The installation location must provide easy access for subsequent connection to the device connectors.
Overall and mounting dimensions are shown in figure below.

| Parameter | Value |
| Overall dimensions (length × width × height), mm | 120 × 120 × 16 |
| Mounting dimensions (length × width), mm | 114 × 114 |
| Mounting holes | M3 |
Headers
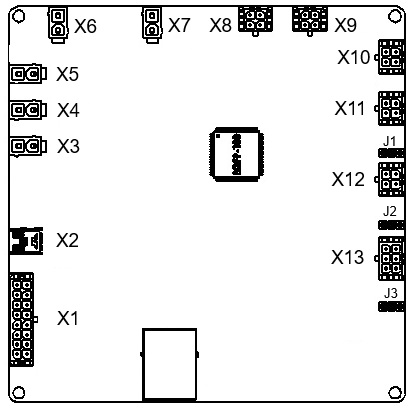
The location and designation of connectors on the BMS Main 2R device are shown below.
X1 – header for discrete inputs and outputs
Receptacle Housing: Hirose ZE05-8DS-HU/R. Terminals: Hirose ZE05-2022SCF

| Pin | Name | Description |
| 1–8 | GND | Ground |
| 9 | DO_1 | Discrete output 1 (+5V, 20mA) |
| 10 | DO_2 | Discrete output 2 (+5V, 20mA) |
| 11 | DO_3 | Discrete output 3 (+5V, 20mA) |
| 12 | DO_4 | Discrete output 4 (+5V, 20mA) |
| 13 | DI_4 | Discrete input 4 (“dry contact”, +5V) |
| 14 | DI_3 | Discrete input 3 (“dry contact”, +5V) |
| 15 | DI_2 | Discrete input 2 (“dry contact”, +5V) |
| 16 | DI_1 | Discrete input 1 (“dry contact”, +5V) |
X2 – miniUSB connector
The miniUSB connector is used to configure the parameters of the BMS Main 2R device.
X3 – header for power supply
Receptacle Housing: Molex 39012020. Terminals: Molex 5556
![]()
| Pin | Name | Description |
| 1 | GND | Ground |
| 2 | V+ | Supply voltage (9-32V) |
X4, X5, X6, X7 – header of relay 1, 2, 3 and 4
Receptacle Housing: Molex 39012020. Terminals: Molex 5556
![]()
| Pin | Name | Description |
| 1 | V+ | Switching voltage (up to 55V, max 3A) |
| 2 | NO | Normally open contact |
Contactor connection example for all relays:

X8 – header for current sensor 1
Receptacle Housing: Molex 430250400. Terminals: Molex 43030

| Pin | Name | Description |
| 1 | +5V | Supply voltage for the current sensor 5V, max 50 mA |
| 2 | GND | Ground |
| 3 | CS1_OUT | Current sensor 1 output |
| 4 | CS1_REF | Current sensor 1 reference signal |
X9 – header for current sensor 2
Receptacle Housing: Molex 430250400. Terminals: Molex 43030
| Pin | Name | Description |
| 1 | +5V | Supply voltage for the current sensor 5V, max 50 mA |
| 2 | GND | Ground |
| 3 | CS2_OUT | Current sensor 2 output |
| 4 | CS2_REF | Current sensor 2 reference signal |
X10 – header for temperature sensors
Receptacle Housing: Molex 430250400. Terminals: Molex 43030
| Pin | Name | Description |
| 1, 2 | GND | Ground |
| 3 | T_SENS1 | Temperature sensor 1 output |
| 4 | T_SENS2 | Temperature sensor 2 output |
X11 – header for BMS Logic
Receptacle Housing: Molex 430250400. Terminals: Molex 43030
| Pin | Name | Description |
| 1 | LOGIC_A | RS-485 line A for communication with BMS Logic |
| 2 | LOGIC_B | RS-485 line B for communication with BMS Logic |
| 3 | LOGIC_5V | Supply voltage for BMS Logic |
| 4 | GND | Ground |
X12 – header for CAN2 interface
Receptacle Housing: Molex 430250400. Terminals: Molex 43030
By defaul
| Pin | Name | Description |
| 1 | CAN2_H | RS-485 line A for communication with BMS Logic |
| 2 | CAN2_L | CAN L line for communication with external equipment |
| 3 | – | – |
| 4 | GND | Ground |
X13 – header for CAN1 and RS-485 interfaces
Receptacle Housing: Molex 430250600. Terminals: Molex 43030

| Pin | Name | Description |
| 1 | RS485_1_A | RS-485 line A for communication with external equipment |
| 2 | CAN1_H | CAN H line for communication with external equipment |
| 3 | +5V | Supply voltage 5V for external devices, max 200 mA |
| 4 | RS485_1_B | RS-485 line B for communication with external equipment |
| 5 | CAN1_L | CAN L line for communication with external equipment |
| 6 | GND | Ground |
J1 – jumper for switching internal CAN bus terminal resistor
 To connect a terminal resistor between the CAN2_H and CAN2_L lines, install a jumper. The jumper is installed according to the table:
To connect a terminal resistor between the CAN2_H and CAN2_L lines, install a jumper. The jumper is installed according to the table:
| Pin | Name | Description |
| 1-2 | 120 Ohm | The 120 Ohm terminal resistor of the CAN1 bus is connected |
| 2-3 | - | The 120 Ohm terminal resistor of the CAN1 bus is disconnected |
J2 – jumper for switching RS-485 bus terminal resistor
To connect a terminal resistor between the RS485_1_A and RS485_1_B lines, install a jumper. The jumper is installed according to the table:
| Pin | Name | Description |
| 1-2 | 120 Ohm | The 120 Ohm terminal resistor of the RS-485-1 bus is connected |
| 2-3 | - | The 120 Ohm terminal resistor of the RS-485-1 bus is disconnected |
J3 – jumper for switching external CAN bus terminal resistor
To connect a terminal resistor between the CAN1_H and CAN1_L lines, install a jumper. The jumper is installed according to the table:
| Pin | Name | Description |
| 1-2 | 120 Ohm | The 120 Ohm terminal resistor of the CAN1 bus is connected |
| 2-3 | - | The 120 Ohm terminal resistor of the CAN1 bus is disconnected |
J3 – jumper for switching CAN2 bus terminal resistor
To connect a terminal resistor between the CAN2_H and CAN2_L lines, install a jumper. The jumper is installed according to the table:
| Pin | Name | Description |
| 1-2 | 120 Ohm | The 120 Ohm terminal resistor of the CAN2 bus is connected |
| 2-3 | - | The 120 Ohm terminal resistor of the CAN2 bus is disconnected |
J5, J6 – jumpers for emergency opening of contactors when removing discrete input signals DIN7, DIN8
The BMS Main 2R device implements a circuit for hardware opening of power contactors when the discrete input signal DIN7 and/or DIN8 (voltage level 9-32V) is removed. To enable this function, jumper J5 and/or J6 must be installed.
Indicators
DS1 – LED indicating device power
| State | Description |
| Lights up green | Device power (+5V) is present |
| Doesn’t light up | No device power |
DS2 – LED indicating device work
| State | Description |
| Blinking green | Executing the battery management program |
| No blinking | Program execution error |
DS3 – LED indicating interaction with child devices
| State | Description (Main 3) | Description (Main 3X) |
| Blinking yellow | The device interacts with BMS Logic devices | The device interacts with BMS Main 3 devices |
| No blinking | - | - |
DS4 – LED indicating loss of connection with child devices
| State | Description (Main 3) | Description (Main 3X) |
| Blinking/lights up red | Communication with one or more BMS Logic devices is lost | Communication with one or more BMS Main 3 devices is lost |
| No blinking | Communication with BMS Logic devices is stable | Communication with BMS Main 3 devices is stable |
DS5-DS10 – LEDs indicating contactor switches 1-6
| State | Description |
| Lights up green | The switch supplies voltage to the contactor winding |
| Doesn’t light up | The switch doesn’t supply voltage to the contactor winding |
DS11 – LED indicating the presence of power supply for contactors
| State | Description |
| Lights up green | Power supply for contactor switches (9-32V) is present |
| Doesn’t light up | Power supply for contactor switches (9-32V) is not present |
Connection procedure
All operations to connect the device must be carried out with the supply voltage removed.
- Connect the power contactors to header X2.
- Connect one or more current sensors, as well as external temperature sensors (if necessary) to header X5.
- Connect BMS Logic devices to header X9.
- Connect digital inputs and outputs (if necessary) to header X3.
- Connect the high voltage bus (if necessary) to headers X11-X14.
- Connect the high-voltage network integrity circuit (if necessary) to header X4.
- Connect external devices (if necessary) to header X6.
- Connect other devices (BMS Indication, BMS Display, if necessary) to header X7.
- If the BMS Main 2R is the last device on the RS-485-1, CAN1, or CAN2 bus, install jumpers J1-J3.
- Connect an external power supply to header X1. The device will start when there is a 9-32V power supply and one of the KEYRUN or CHARGE_ON signals with a voltage of more than 8.5V is supplied.